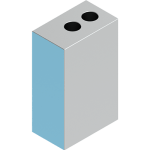
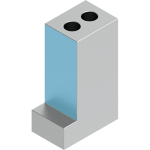
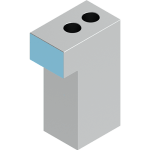
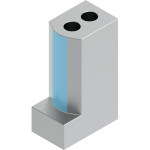
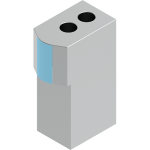
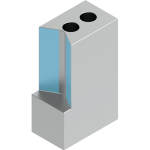
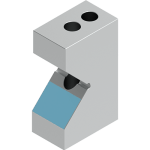
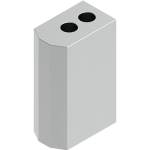
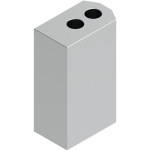
The gripping surface is marked blue
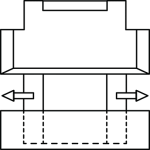
Geometry model 1 O.D. gripping

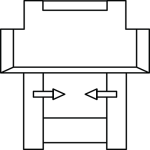
Geometry model 1 I.D. gripping

Geometry model 2 O.D. gripping

Geometry model 2 I.D. gripping

Geometry model 3 O.D. gripping

Geometry model 3 I.D. gripping

Geometry model 4 O.D. gripping

Geometry model 4 I.D. gripping

Geometry model 5 O.D. gripping

Geometry model 5 I.D. gripping

Geometry model 6 O.D. gripping

Geometry model 8 O.D. gripping