在自動化生產中,抓取系統和自動化組件在零部件的高效搬運方面起著決定性作用。除運輸以外,還需要在正確的時間將正確的零件精確地放置在正確的位置上。對于更高級別的任務(例如裝配流程或不同工序間的平穩過渡)而言,零件搬運常常是一個重要的子流程。?
?SCHUNK 為您提供可靠的標準部件,可用于抓取、移動、旋轉和補償,使您能夠順利地搬運零部件。此外,SCHUNK 還能為客戶提供特殊的個性化解決方案,實現客戶的個性化搬運需求。



自動化零部件搬運的范圍從小型/輕型零件擴展到大型/重型工件。要求因工件和行業而異:如機床工作環境中所需的堅固性和耐用性,生命科學領域的靈敏度和清潔度,以及大規模自動化對周期時間及精度的需求。
無論具體應用是什么,在搬運零部件時,有某些基本原則始終適用:
流程可靠性、可靠性和系統可用性 。
在繁雜的流程中正確地分揀和分離批量交付的工件,是零件搬運領域中的一項關鍵應用。通常是重量小于 100 克的工件,例如注塑成型零件、小型金屬嵌件以及小型車削和銑削零件。

SCHUNK 提供各種用于分揀和分離的搬運部件。全新的 2D 抓取套件還具備另一點優勢,它能夠使用攝像頭和專門開發的人工智能軟件來識別組件,并確定理想的抓取點。
在應用示例中,塑料齒輪借助振動器實現分離,然后由 2D 抓取套件進行檢測,并由 EGK 機電一體化機械手穩定地抓取,并按類型和位置分類存放。
為了方便拾取及放置,工件會以特定的方式進行精確抓取和存放。這提高了生產速度,同時確保無差錯地搬運不同尺寸和形狀的零件。SCHUNK 為此配有全面的產品組合。
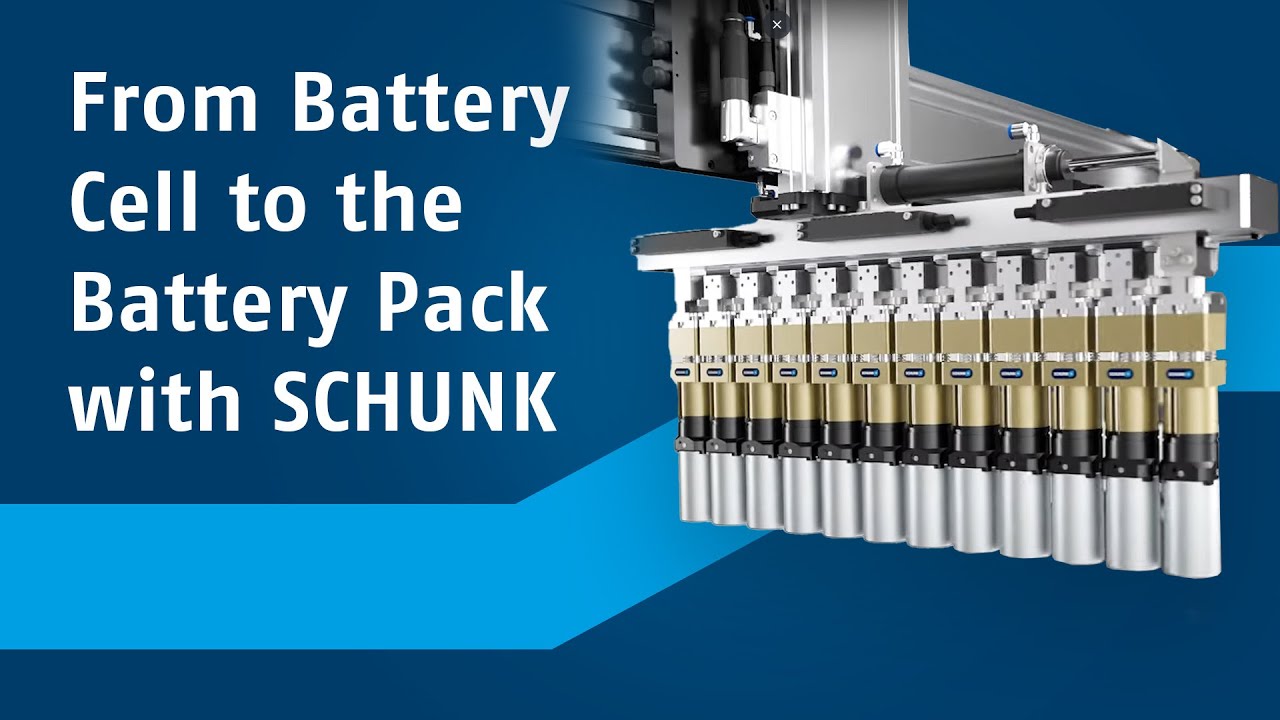
該應用示例展示了各個生產步驟,您可以看到單個電池組裝為成品電池包的過程。
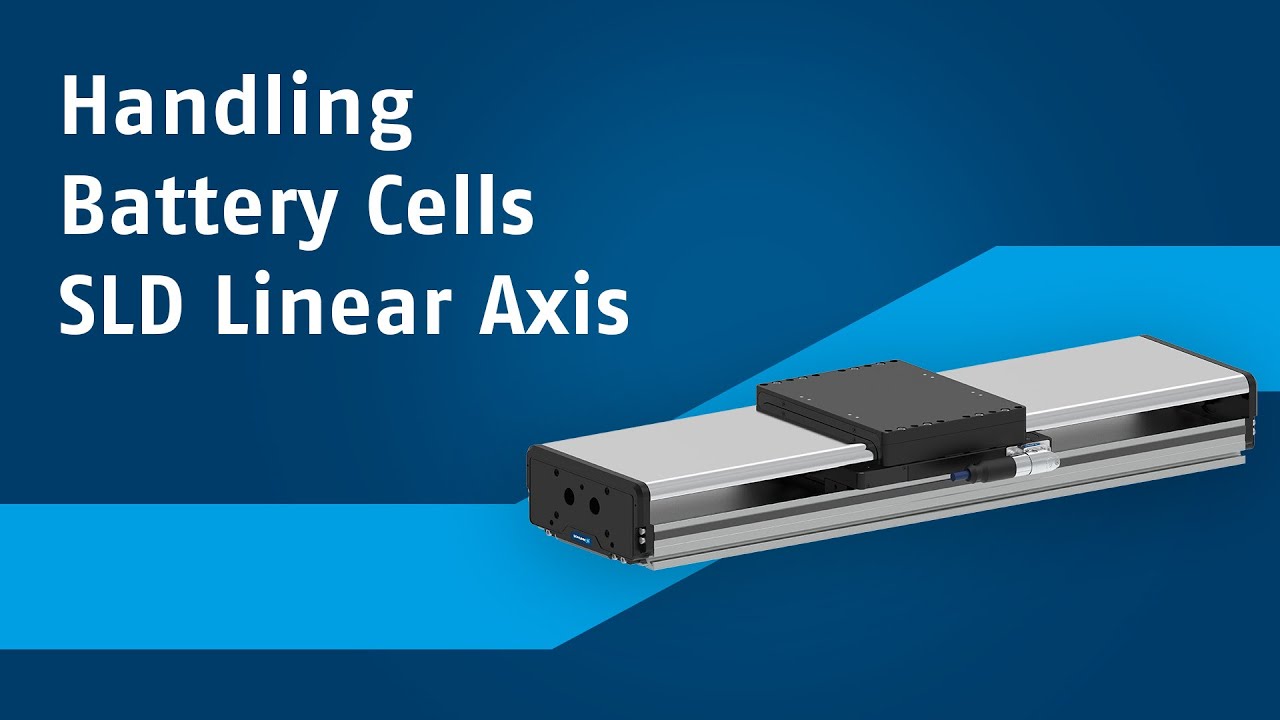
在這里,磁力 RCG 機械手負責電池的搬運。動態直線單元 SLD 可確保較短的周期和較高的定位精度。
使用龍門軸將方形電芯從傳送帶上取出,然后放入電池模塊中。這便將多個電池組裝成了電池模塊。該搬運由氣動通用型機械手 PGL-plus-P 執行,借助旋轉模塊 ERT 增加了一個旋轉軸。
CoLab(SCHUNK 應用中心)提供了一個與您合作測試您計劃中應用的環境。
我們為您提供工件的可行性研究、流程分析及演示。讓您能夠在調試期間最大限度地降低風險并節省時間。
咨詢您的 SCHUNK 聯系人,我們期待與您討論并開發應用。